|
Dongyu Yan 💫 (闫栋宇) I'm a PhD student (2024 ~ 2028), working with Prof. Ying-Cong Chen at AI Thrust, Information Hub, Hong Kong University of Science and Technology (Guangzhou). I receievd my Master degree (2021 ~ 2024) in the School of Mechanical Engineering and Automation at Harbin Institute of Technology (Shenzhen), supervised by Prof. Haoyao Chen in nROS-lab. I obtained a B.Eng (2017 ~ 2021) from Harbin Institute of Technology. I'm now a research intern at Lightspeed Studios of Tencent IEG. Before that, I was a research intern in robotics at the Department of Flight System of DJI (Dec. 2021 ~ Oct. 2022), and a research intern in computer vision at the Department of Transformer of Megvii (May. 2021 ~ Aug. 2021). |

|
ResearchMy research interest lies in computer vision, 3D generation, and robotics. I used to work on topics that combine implicit 3D representation with robotics tasks, including neural reconstruction, neural SLAM, and implicit NBV planning. Recently, I'm interested in 3D diffusion models, especially in the context of object texture generation and scene generation. My research object is to build efficient and powerful 3D generative models that can be really applied by industries like game asset creation, special effect production and computer aided designing. Below are some of my selected papers. Some papers are highlighted. |
Selected Publications |
 |
We introduce FlexPainter, a novel texture generation pipeline that enables flexible multi-modal conditional guidance and achieves highly consistent texture generation. We achieve multi-modality mixing, flexible conditional control, and high-fidelity stylization relying on reference images. |
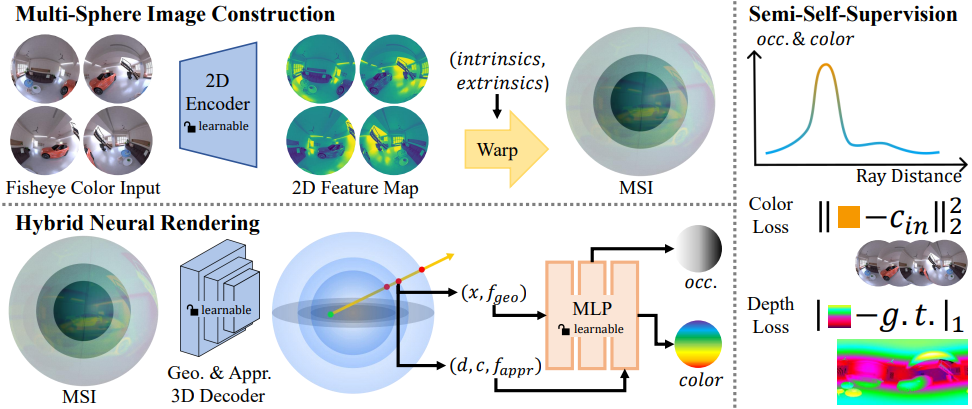 |
We create a generalizable NeRF that takes four fisheye images as input and outputs a 3D MSI representation for novel view synthesis and depth estimation. It can be trained with synthetic depth data only and can generalize to a wide range of scenarios. We also released a fisheye multi-view dataset for training and evaluation. |
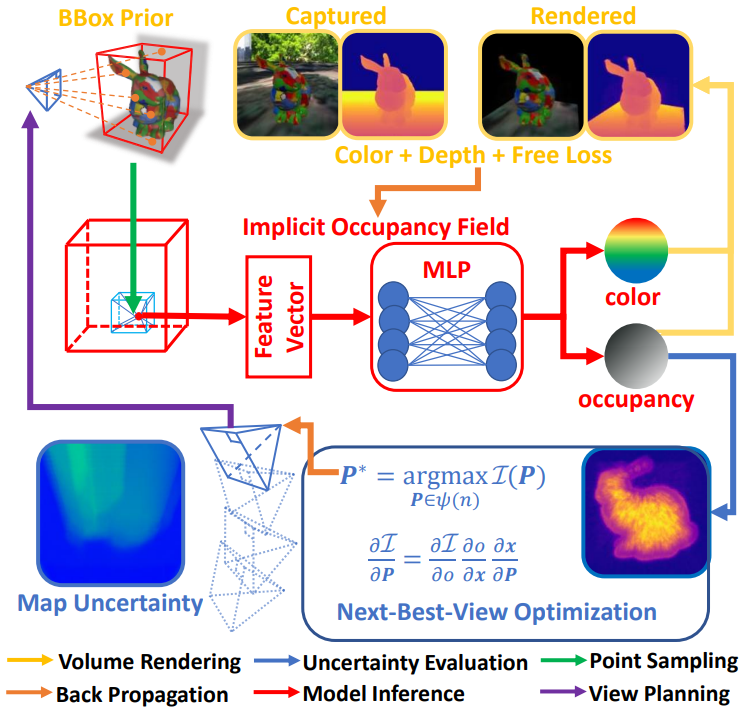 |
We propose an active implicit object reconstruction method leveraging direct uncertainty evaluation from implicit occupancy map and Next-Best-View optimization. It directly optimizes a vitrual camera trajectory in the uncertainty field to maximize the information gain for the current reconstruction. |
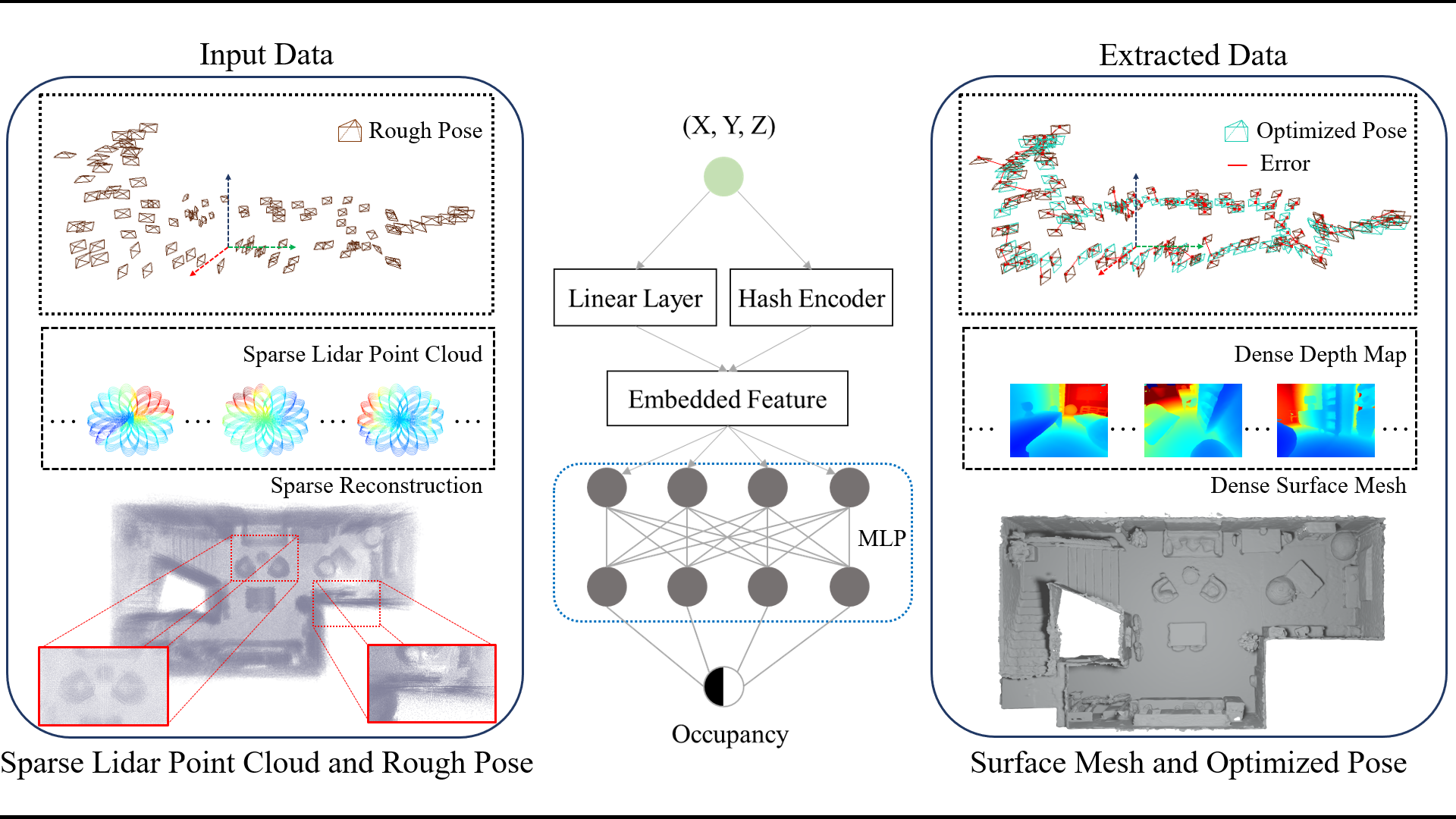 |
We propose an implicit reconstruction method that uses LiDAR scans as input, which is efficient, accurate, and can be applied in various scenarios. This method can be applied for real-world scenes, even with sparse LiDAR scans and badly aligned poses, which can be shown in the self-collected dataset we released. |
Competitions |
 |
My time in HITCRT taught me a lot. Because of it, I embarked on the path of scientific research today. I will always be grateful to my teammates who fought alongside me. Hope our team can gets better and better. |
About Me |



|
|
|
「愛されなくてもいいよ、君がいるなら!」
|