MSI-NeRF: Linking Omni-Depth with View Synthesis through Multi-Sphere Image aided Generalizable Neural Radiance Field
Dongyu Yan, Guanyu Huang, Fengyu Quan, Haoyao Chen.
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV 2025)
Arxiv /
Paper /
Video /
Github
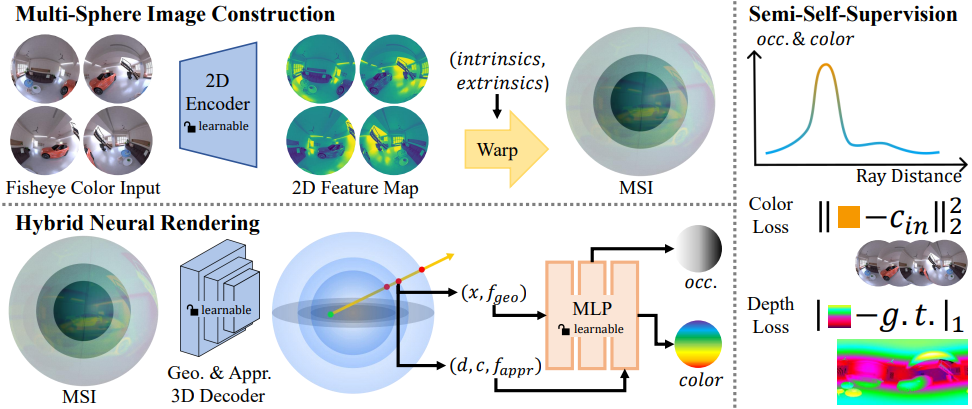
We create a generalizable NeRF that takes four fisheye images as input and outputs a 3D MSI representation for novel view synthesis and depth estimation. It can be trained with synthetic depth data only and can generalize to a wide range of scenarios. We also released a fisheye multi-view dataset for training and evaluation.